Virtual Surgery
Surgical Planning with Virtual Laparoscopic Camera
Collaboration : Dr. Dmitri Oleynikov, University of Nebraska Medical Center; Dr. Igor Guskov and Sergey Klibanov , University of Michigan
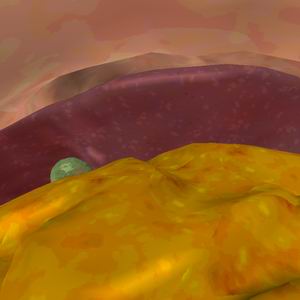
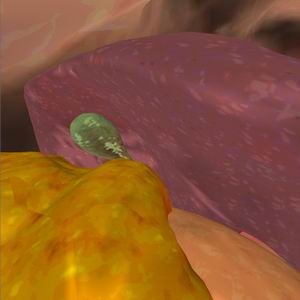
Video: Fly-through simulation of laparoscopic view of an abdomen
Background: Minimally invasive surgical procedures require the surgeon to operate based on a 2-dimensional (2D) image visible through the laparoscopic device. Laparoscopic virtual reality simulators have not been designed to represent individual patient’s anatomic characteristics but rather ideal body or single volunteer based simulation. The utility of patient specific simulation lies in preoperative surgical planning that is tailored the variations in anatomy and body habitus of individuals. Computer tomography scans (CT) are used as a diagnostic tool and guide to intra-abdominal pathology. Preoperative CT imaging allows the surgeon to identify this pathology and plan operative correction. CT imaging provides an anatomic rendering without accounting for the actual image the surgeon will encounter at laparoscopy. Whereas organs and vessels can be accurately rendered in 3D, the surgeon is required to visually interpret these relationships to a 2D laparoscopic perspective. The objective of this study is to generate a 3D laparoscopic simulation of peritoneal surface anatomy based on abdominal CT scanning and physically based modeling of organ displacement after abdominal insufflation. This will allow surgeons to combine anatomic data with visual cues of a 2D laparoscopic environment in preoperative surgical planning.
Method: Thin cut stack of abdominal CT images was obtained on a normal volunteer. Internal organs were segmented based on tissue density through the deformable models approach. The physical based model was then used to compute modified locations and deformations of organs under the inflation procedure. The resulting model is viewed through virtual camera controlled by the user preserving laparoscopic perspective. To enhance perceptual realism texture mapping was used for organ coloring. The overall approach is verified by comparison of rendered views with clinically obtained laparoscopic imagery.
 |
 |
Discussion: Preoperative planning with CT scan virtual laparoscopic simulation allows the surgeon to see anatomic relationships as they appear during the actual procedure. Complex surgical intervention can be practiced prior to the actual operation and used as a teaching aid for surgical training. Minimally invasive surgical procedures are uniquely suited for this approach due to the limitations in tactile feedback, restriction of motion and 2D display. Virtual reality preoperative planning allows patient specific data to be modeled in-order to allow the surgeon to practice a complex surgical intervention without actually operating on the patient. In our literature search we did not identify any patient specific models for minimally invasive surgery. This is partially a result of the incredibly large amount of data that is required to construct virtual reality models. It has not been possible to acquire such large sets of data during routine clinical practice. Our method allows for modeling based on standard CT imaging data sets with only minimal resolution, i.e. 1cm thick slices.
Novelty: A patient specific, CT based, interactive, virtual laparoscopic simulation is developed, where anatomic 3D structure is rendered from the viewpoint of the surgeon during minimally invasive surgery.
 |
 |
More details on this project can be found in the poster:
D. Oleynikov, L. Zhukov, I. Guskov, S. Klibanov
Preoperative Surgical Planning Using Virtual Laparoscopic Simulation based on CT Imaging
Medicine Meets Virtual Reality (MMVR 2002), January 2002.